자율주행
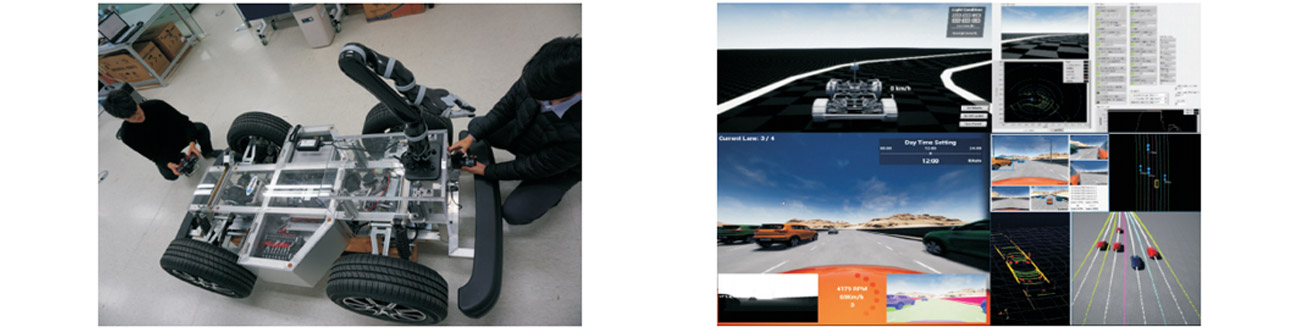
실차 기반의 자율주행 연구 테스트는 활발히 진행중에 있습니다. LiDAR, Camera, GPS 등 센서기반의 인지, 판단, 제어의 분야로 나누어서 다양한 연구를 진행합니다. 하지만 실차의 경우 테스트 환경의 제약, 안전문제, 예산문제로 연구에 제약이 많습니다. 이러한 상황을 개선하고자 ERP-42 실차 ¼ 플랫폼을 이용하여 연구 및 교육이 가능해 졌습니다. 모터, 조향, 브레이크는 이미 프로그래밍이 되어 있어 상단에 ADAS, 항법, 사물인지 등 연구분야에 집중할 수 있습니다. 또한 플랫폼 기반의 시뮬레이터도 함께 제공함으로 시뮬레이션에서 검증된 알고리즘을 그대로 플랫폼에 적용할 수 있습니다. Velodyne, Sick와 같은 주요 센서에 대한 드라이버를 제공하며 자율주행시 발행하는 상황을 이벤트화 하여 안정적인 프로그래밍을 구현할 수 있습니다. 또한 자율주행 이라는 어려운 연구주제를 수업까지 확장하는데 LabVIEW가 문턱을 많이 낮춰주었습니다.